ロボット関連商品のご紹介

近年、人手不足などを背景に、ものづくり現場ではFA(ファクトリーオートメーション:生産工程の自動化)やIoT(インターネットオブシングス:モノのインターネット)が普及しています。また、人の代わりに組立や検査などの作業を行う協働ロボットも高い注目を集めています。
NTNは100年以上にわたって培ってきた技術を活用し、こうした市場のニーズに対応するロボット関連商品を展開しています。FA化やIoT化、ロボットの普及に貢献する各種商品を通じて、ものづくり現場の省人化とさらなる効率化を後押しします。
手首関節モジュール「i-WRIST®」
i-WRIST®は生産現場の課題にソリューションを提供します!
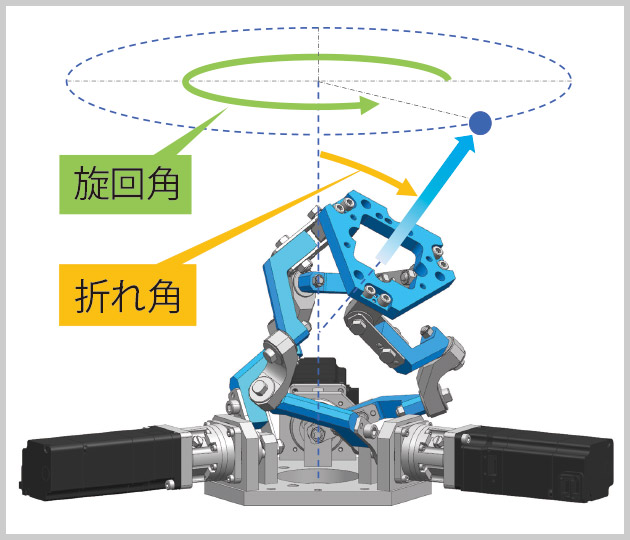
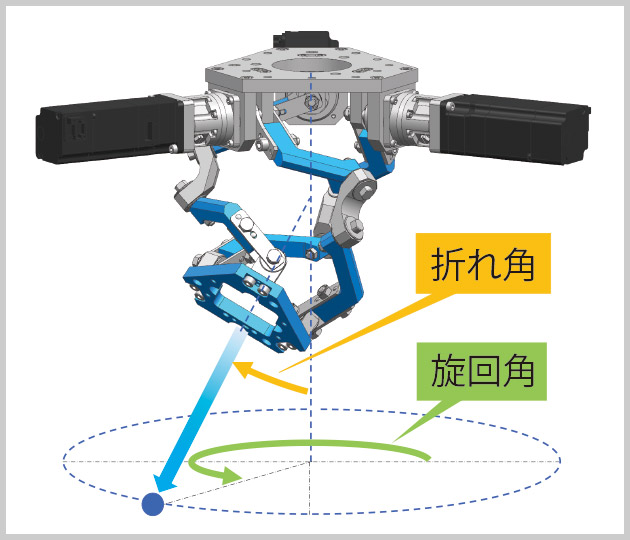
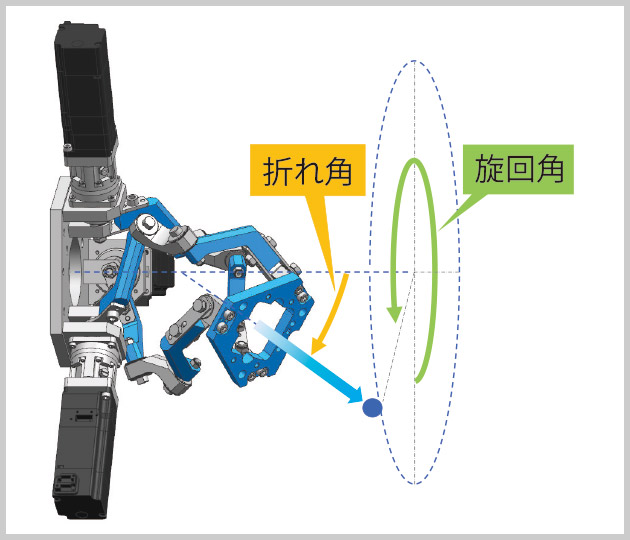
手首関節モジュール「i-WRIST®」は、高速に位置決めを行うロボット用モジュールです。
独自の駆動機構により、まるで人の手首のような自由自在な動きを実現します。
高速性、操作性、省スペースをはじめさまざまな特長をもつi-WRIST®が生産現場の課題解決に貢献します。

特長
特長① 高速性
課題
省人化でロボットを入れたが、結局、人に頼っている
ロボットを入れたが、目標のタクトタイムに届かない。結局、人のほうが速くて便利。

i-WRIST®なら
細かい動作を高速で実現!
i-WRIST®の高速性は、多方向からワークにアプローチする際に特に効果を発揮します。
従来のロボットでは難しかったタクトタイムでも、i-WRIST®なら実現可能です。
4点にアプローチする動きの比較
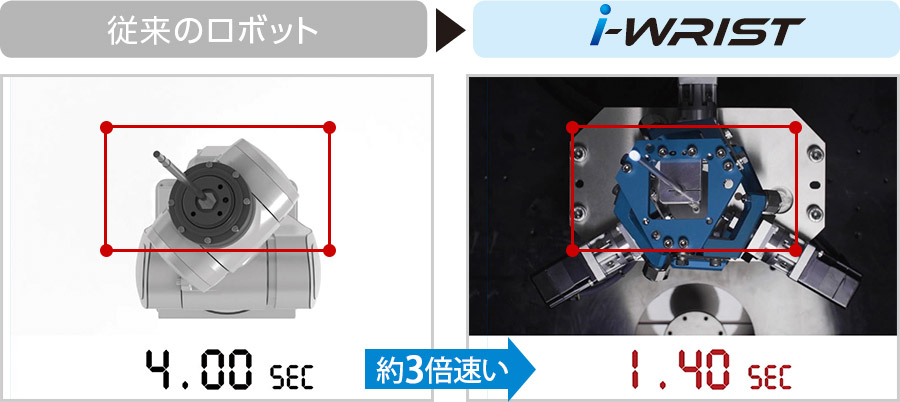
従来のロボットでは4秒かかる動きをi-WRIST®なら半分以下の1.4秒で実現
多方向からワークにアプローチする動きの比較
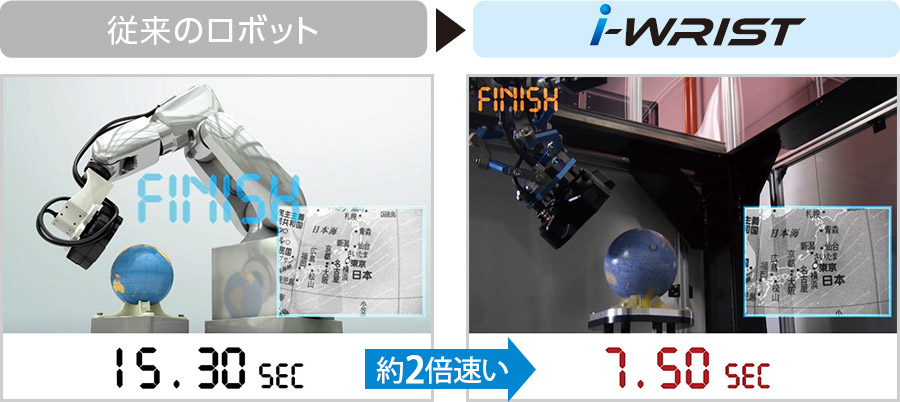
従来のロボットでは15秒以上かかる動きを
i-WRIST®+直動アクチュエータなら半分以下の7.5秒で実現
特長② 操作性
課題
ロボットの操作が難しくて使いこなせない
ロボット用プログラミング言語が難しくて、ほとんど使いこなせていない。
教育となると時間がかかる。
i-WRIST®なら
プログラミング言語いらずで簡単操作!
従来のロボットを動かすためには専用のプログラミング言語が必要でした。
i-WRIST®はプログラミング言語そのものが不要なため、簡単に操作できます。
専用コンソールの画面を操作するだけで、簡単にティーチングが可能
パソコン上で効率よく動作パターンを作成できるソフトウェアも準備
専用コンソールで簡単操作

専用コンソールで設定パラメータの変更やティーチングを簡単に
専門的なプログラミング言語の知識は不要
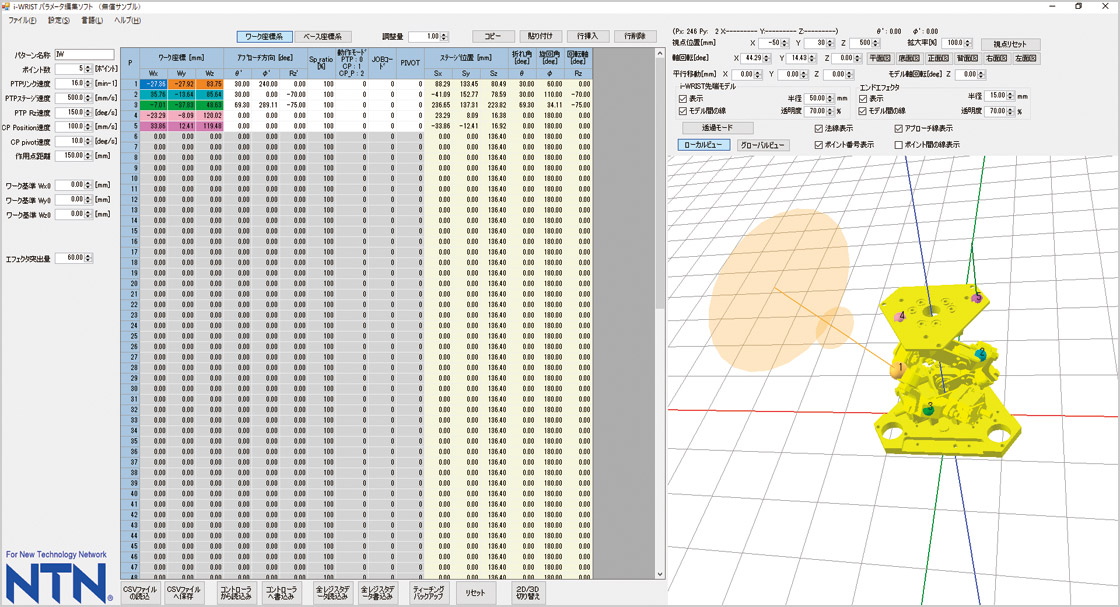
ポイントデータ編集ソフトを使えばさらに簡単
特長③ 省スペース
課題
そもそも生産現場のスペースに余裕がない
省人化のためには、これまで人が作業していたスペースに自動化設備を入れたい。
しかし、ロボットを利用した設備はどうしても大きくなってしまうので、設置は困難。

i-WRIST®なら
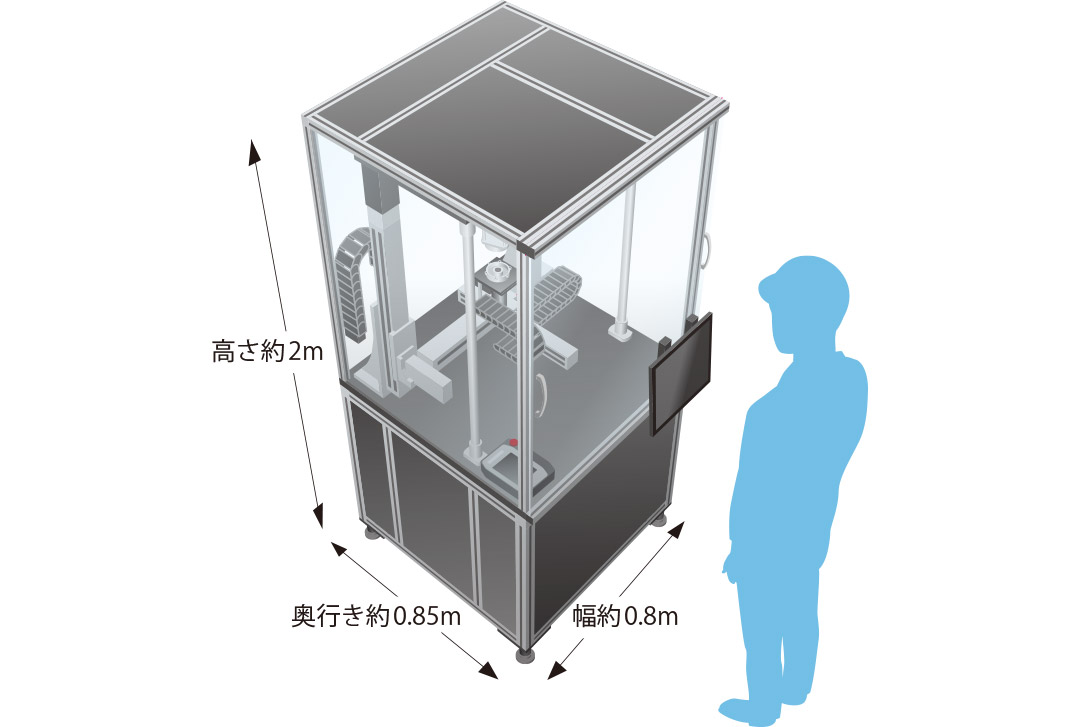
幅約0.8mのコンパクト設計!
これまで生産現場のスペースの都合で自動化設備の設置をあきらめていた工場でも、i-WRIST®なら設置することができます。
外観検査装置の設置サイズ比較例
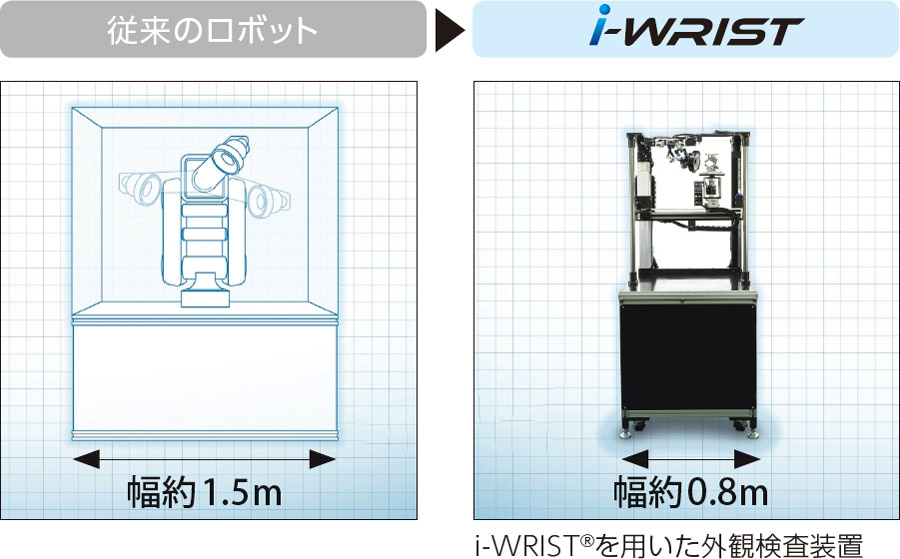
直動アクチュエータや回転アクチュエータと組み合わせることで、i-WRIST®は「従来のロボットを用いた外観検査装置」の約半分のスペースで設置可能
バージョンアップでさらに使い勝手が向上
2018年の量産開始以来、お客さまからいただいたさまざまなご要望を受け、2021年に各種機能をバージョンアップしました。
取付方向は下向きだけでなく、上向き、横向き、傾斜方向にも対応可能となり、外部通信インターフェースには、従来のパラレル入出力(I/O)に加えて産業用ネットワーク「Ethernet」にも対応し、通信可能な情報量を増やしました。また、産業用ロボットの安全規格ISO10218-1に準拠する仕様としたほか、最大指令速度を従来から1.6倍向上させ、さらなる高速化を実現するなどこれまで以上に使い勝手を向上させました。
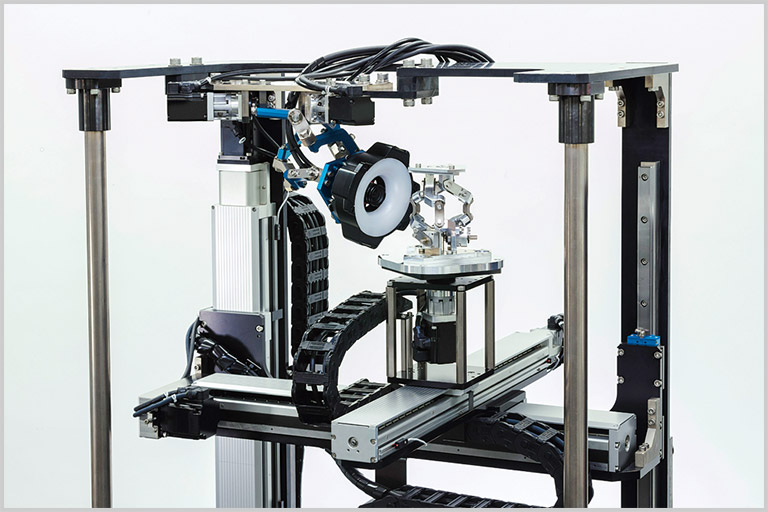
設置例
上向き
下向き
横向き
導入事例
i-WRIST®の先端部にエンドエフェクタを取り付けたり、他のロボットと組み合わせたりすることで、さまざまな装置に早変わりします。
液剤(グリース、接着剤)塗布
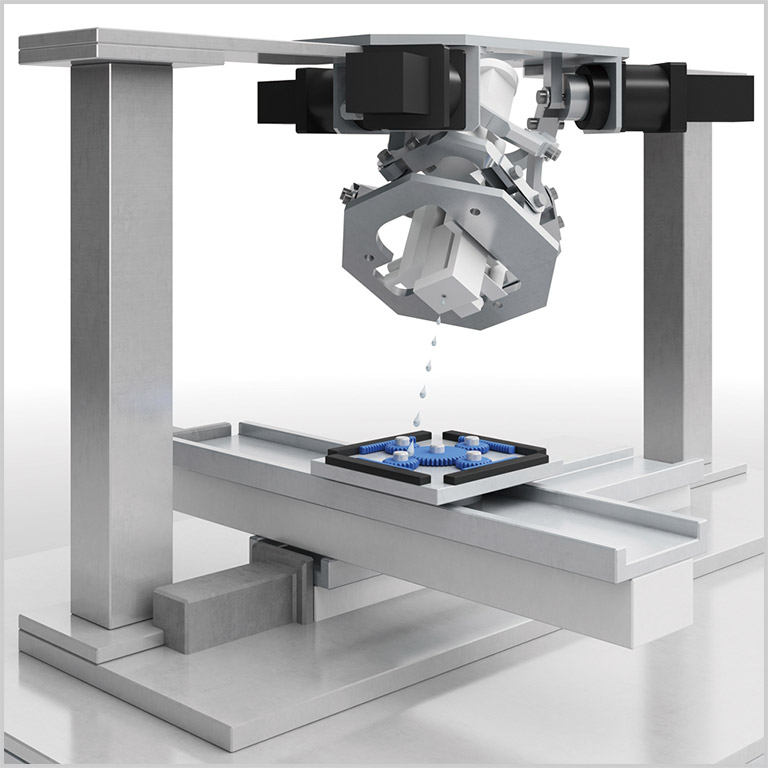
i-WRIST®にディスペンサーを搭載し、多方向から狙った位置に液剤を高速塗布
洗浄

i-WRIST®に洗浄ノズルを搭載した装置構成例
外観検査
i-WRIST®にカメラ・照明を搭載し、複雑形状のワークを多方向から高速撮像
組立
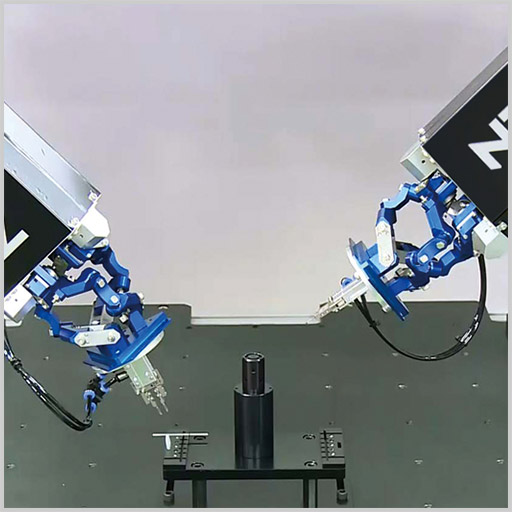
i-WRIST®にグリッパーを搭載した装置構成例
ドライブシャフトの技術から生まれた「i-WRIST®」
ドライブシャフトは、自動車のエンジンの回転をタイヤになめらかに伝えるための商品で、自動車が走ったり、曲がったりするためには欠かせないものです。NTNは1960年代に国内メーカで初めてドライブシャフトの量産に成功し、現在、世界シェア2位を誇っています。なめらかに回転を伝えることができるドライブシャフトの技術を用いることで、大きな角度を取って自由自在な動きをする「i-WRIST®」が生まれました。

角度を変えながら回転を伝えるドライブシャフト
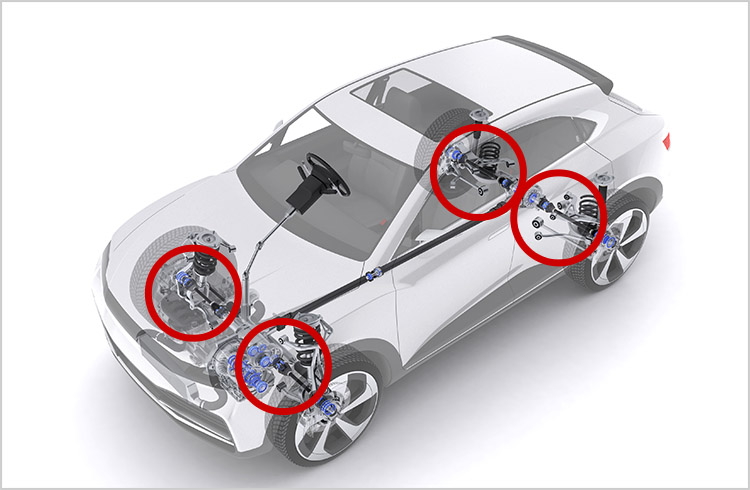
ドライブシャフトの適用箇所
仕様
| タイプ | 折れ角90°仕様 | 折れ角45°仕様 | |
|---|---|---|---|
| サイズ | W417×D365×H196mm | W474×D415×H185mm | |
| 質量 (i-WRIST®本体) |
約4.9kg | 約8.1kg | |
| 搭載質量 (許容慣性モーメント) |
定格可搬質量1kg(0.025kg・m2)、最大可搬質量3kg(0.060kg・m2) | ||
| 可動範囲 | 折れ角 | 90° | 45° |
| 旋回角 | 360° | ||
| モータ出力 | 50W(×3) | ||
| 繰り返し位置決め精度 | ±0.05° | ||
| 使用電源 | DC24V(専用コントローラ、専用コンソール) AC200V(i-WRIST®本体) |
||
| 使用温度 | 0~+40℃ | ||
| 外部インターフェース | パラレル入出力(I/O)、Ethernet | ||
| 安全規格対応 | ISO 10218-1(JIS B 8433-1)に準拠 本商品はお客様の装置に組み込んで使用するものです。 必ずお客様の最終商品で安全規格への適合をご確認ください。 |
||
| 騒音値 | 70dBA以下 | ||
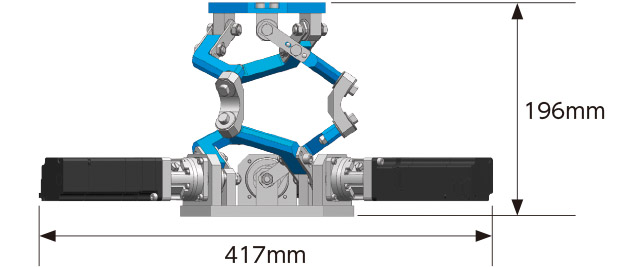
折れ角90°仕様
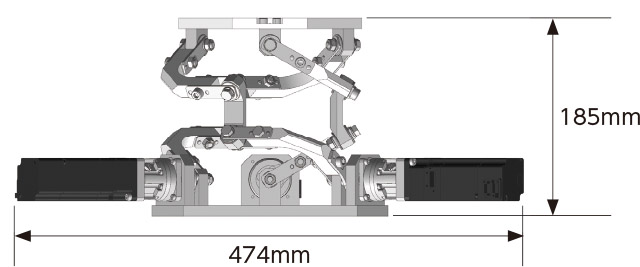
折れ角45°仕様
関連リンク
手首関節モジュール「i-WRIST®」特設サイト:
https://www.ntn.co.jp/i-wrist/index.html
「THE CHALLENGE-未来を切り開く-」
https://www.ntn.co.jp/japan/the_challenge/detail/index03.html
プレスリリース
手首関節モジュール「i-WRIST®」の量産開始:
https://www.ntn.co.jp/japan/news/new_products/news201800062.html
手首関節モジュール「i-WRIST®」の機能を拡張:
https://www.ntn.co.jp/japan/news/new_products/news202100034.html
「複列磁気リング」
高分解能で絶対角度を検出
すべてのロボットに緻密でなめらかな動きを
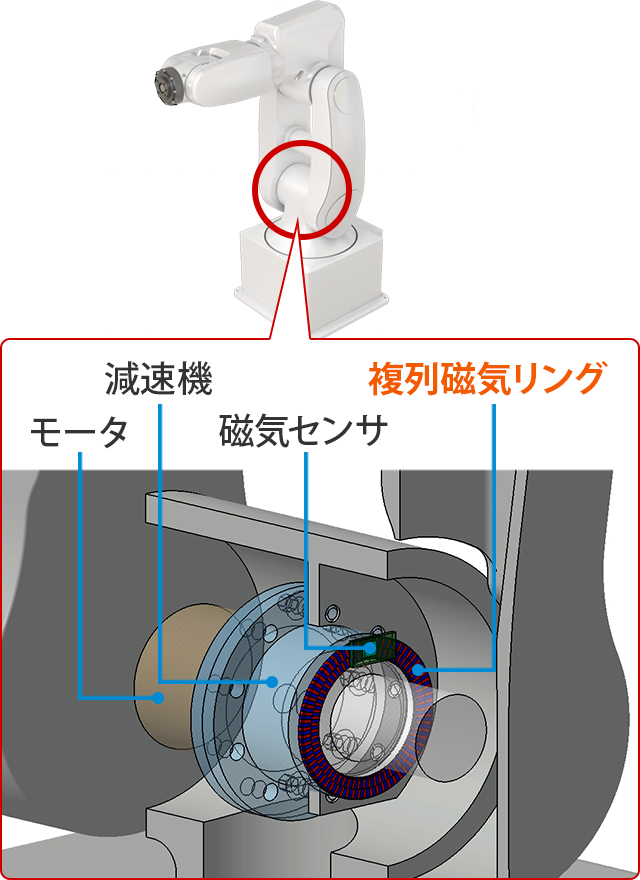
「複列磁気リング」は、磁性材料を練り合わせたゴム材料をリング状の芯金に接着させた商品です。専用の磁気センサと組み合わせて、ロボットの関節部などに使用します。磁気センサ内部のパラメータ設定で最大20bit(分解能 約0.000345°)のきめ細やかな角度検出を可能とし、ロボットの緻密な動きの制御に貢献します。 磁気式のため、振動や温度、ちり、ほこり、油分による影響を受けにくく、さまざまな環境下で使用が可能。 ロボット関節部だけではなく、サーボモータなどの絶対角の検出にも最適な商品です。
特長
特長① 独自の着磁技術で高精度な角度検出に貢献
磁気リングには極数(N極やS極といった磁極の数)が異なる2列の磁気トラックが形成されています。磁気リングが回転すると、専用のセンサが2列の磁気トラックの磁極の変化を読み取り、電気信号で絶対角を高精度に出力します。
高精度な角度検出には、N極とS極を一定の間隔で規則正しく着磁させる必要があります。また、2列の磁気トラックを形成する場合、隣り合う磁気トラックに影響を与えない高精度な着磁技術が求められます。NTNは、これまでの商品開発で培った独自の着磁技術により、2列の磁気トラックを精度良く形成することに成功しました。
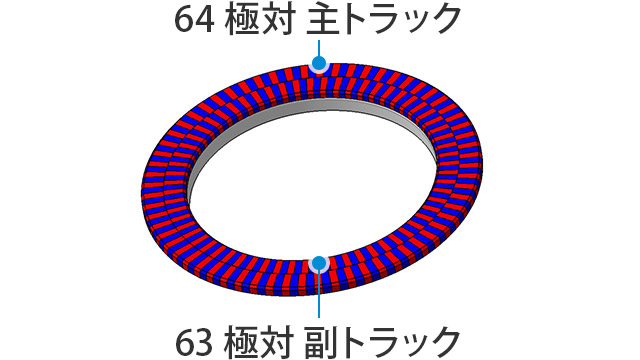
着磁パターンのイメージ(64/63極対)

異なる極対(N極とS極のペア配列)を複列に精度良く着磁
特長② ロボットの設計自由度を高める
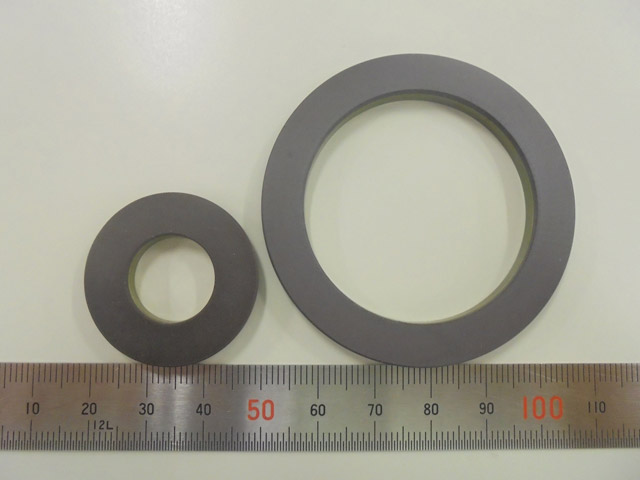
半径方向の寸法が小さいラジアルタイプと、軸方向幅寸法が小さいアキシアルタイプを用意。いずれも大口径のため、ケーブルが通る中空軸に取り付けることができます。取付け構造に適したタイプを用いることで、設計の自由度を高め、コンパクト化・軽量化に貢献します。

ラジアルタイプ

アキシアルタイプ
ラインアップ
極対と磁極ピッチ別の豊富なラインアップ
N極とS極のペア配列を示す極対では、64/63極対シリーズと32/31極対シリーズをラインアップしています。32/31極対シリーズは、64/63極対シリーズと比べて外径は約1/2にサイズダウンするとともに、質量も既存の市販品(32/31極対)と比べ、約1/2に軽量化しています。
さらに、64/63極・32/31極対の各シリーズについて、磁極ピッチ(磁石のN極とS極の間隔
)が1.28㎜、1.5㎜、2.0㎜の3種類を取り揃えております。磁極ピッチは、広くなるほど内径寸法が大きくなり、設計シーンにあわせて最適な極対と磁極ピッチを持つ商品をお選びいただけます。

ラジアルタイプ(MTR)
(左:32/31極対シリーズ、
右:64/63極対シリーズ)
アキシアルタイプ(MTA)
(左:32/31極対シリーズ、
右:64/63極対シリーズ)
センサ付軸受から生まれた「複列磁気リング」
「複列磁気リング」を実現した着磁技術は、回転センサと軸受を一体化した「回転センサ付軸受」の開発によって培われたものです。「回転センサ付軸受」はモータの回転数を検知するための商品です。このほか、自動車のABS(アンチロック・ブレーキ・システム)に使用されるセンサ付ハブベアリングも開発。これらの商品は、さまざまな産業機械や自動車で活躍しています。

回転センサ付軸受

センサ付ハブベアリング
仕様
| ラジアルタイプ | MTR32 | MTR32-1 | MTR32-2 | MTR64 | MTR64-1 | MTR64-2 | |
|---|---|---|---|---|---|---|---|
| 着磁極対数 (主トラック/副トラック) |
32/31 | 32/31 | 32/31 | 64/63 | 64/63 | 64/63 | |
| 磁極ピッチ(mm) | 1.28 | 1.50 | 2.00 | 1.28 | 1.50 | 2.00 | |
寸法(mm)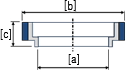 |
[a] | φ18 | φ21 | φ31 | φ44 | φ52 | φ72 |
| [b] | φ25.5 | φ29 | φ39 | φ51.5 | φ59.5 | φ79.5 | |
| [c] | 8.2 | 8.2 | 8.6 | 8.2 | 8.2 | 8.6 | |
| <参考>センサ型式 | iC-MU | iC-MU150 | iC-MU200 | iC-MU | iC-MU150 | iC-MU200 | |
アキシアルタイプ |
MTA32 | MTA32-1 | MTA32-2 | MTA64 | MTA64-1 | MTA64-2 | |
|---|---|---|---|---|---|---|---|
| 着磁極対数 (主トラック/副トラック) |
32/31 | 32/31 | 32/31 | 64/63 | 64/63 | 64/63 | |
| 磁極ピッチ(mm) | 1.28 | 1.50 | 2.00 | 1.28 | 1.50 | 2.00 | |
寸法(mm)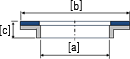 |
[a] | φ15 | φ19.5 | φ29 | φ41 | φ50 | φ70 |
| [b] | φ30 | φ34.5 | φ44.5 | φ56 | φ65 | φ85 | |
| [c] | 4 | 4 | 4 | 4 | 4 | 4 | |
| <参考>センサ型式 | iC-MU | iC-MU150 | iC-MU200 | iC-MU | iC-MU150 | iC-MU200 | |
仕様 |
32/31極対シリーズ |
64/63極対シリーズ |
|---|---|---|
| 最大分解能(bit) | 19 | 20 |
| 許容回転速度(min-1) | 12,000 | 6,000 |
| 使用温度範囲(℃) | -40~+110 | |
関連リンク
「THE CHALLENGE-未来を切り開く-」
https://www.ntn.co.jp/japan/the_challenge/detail/index07.html
プレスリリース
アキシアルタイプの「複列磁気リング」を新たに開発し量産を開始:
https://www.ntn.co.jp/japan/news/new_products/news201800069.html
「複列磁気リング」シリーズに小型サイズを追加
https://www.ntn.co.jp/japan/news/new_products/news202000045.html