

軽可搬重量ピッキングロボット用「ロータリアクチュエータ式ハンド」を開発2022年11月9日
取り逃がさない・落下させない精密ハンドで、製造現場の生産性向上に貢献
NTN株式会社(以下、NTN)は、軽可搬重量(5kg以下)のピッキングロボット向けに、小型・軽量で、0~100°の範囲で設定した任意の2点の角度に姿勢変更が可能な「ロータリアクチュエータ式ハンド」を開発しました。ピッキングロボットの先端部に装着し、ランダムな姿勢の対象部品(以下、ワーク)に対してさまざまな方向・角度からのピッキングが可能となります。ワークの取り逃しや搬送時の落下を防止することにより、搬送や整列における生産性の向上に貢献します。
ピッキング作業には、一般的に高速で強度の高い水平多関節ロボット(以下、スカラロボット)が使用されています。スカラロボットは、ワークに対して横方向や斜め方向からのピッキングができず、上方からのピッキングに限定されるため、ピッキング可能な姿勢のワークが流れてくるまで待機することがありました。さらに、ロボットの先端に装着するハンドは一般的に重量が大きく、可搬重量が大きいロボットが必要となり、ロボットの動作速度が遅くなったり、周辺装置との干渉を回避するため装置全体が大型化することも課題となっていました。
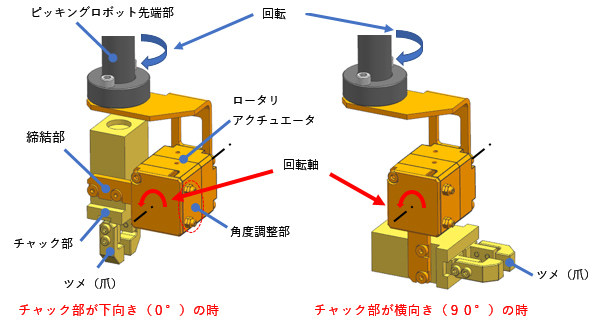
NTNが今回開発した「ロータリアクチュエータ式ハンド」はロータリアクチュエータの回転軸を中心にワークを掴むチャック部との締結部が回転することで、チャック部の位置や姿勢を0~100°の範囲で設定した2点の角度に変更することが可能です。ピッキングロボットの先端部で本開発品を回転させることで、横方向や斜め方向からのピッキングが可能となり、ワークの取り逃がしを大幅に削減します。ロータリアクチュエータ、チャック部をコンパクトに一体化することで、小型・軽量化を図るとともに周辺装置の干渉も防止しています。さらにチャック部のツメ形状を最適化することによりワークの落下も防止します。
スカラロボットを用いたピッキングロボットと本開発品を組み合わせることで、従来では困難とされていたランダムな姿勢のワークを高速でピッキングすることが可能となり、生産性の向上に貢献します。さらにピッキング後の搬送中にワークの姿勢を変更することも可能なため、ワーク姿勢を整える機構や工程を省略することができ、搬送ラインのコンパクト化にも貢献します。
NTNは、中期経営計画「DRIVE NTN100」Phase 2において、新領域である「ロボット周辺モジュール」分野の強化に取り組んでいます。本開発品を含め、これまで培ってきた精密加工や位置決め技術を応用した商品の開発・提供を通じて製造現場の自動化や効率化に貢献し、ロボット市場のさらなる発展に寄与してまいります。
特長
| 1. ランダムな姿勢のワークを把持可能 | ワークの姿勢に合わせて、上からでも横からでもワークを掴むことが可能 |
|---|---|
| 2. ワークの姿勢を 0°~100°の任意の2点の角度に変更可能 | ピッキング後のワーク姿勢をロボットによる搬送中に変更することが可能で、姿勢変更を行う機構や工程を省略 |
| 3. 小型・軽量 | ロータリアクチュエータとチャック部をコンパクトに一体化しているため、ロボット先端部の重量・慣性が小さくなり高速搬送が可能 |
用途展開
搬送、組付け
商品写真

参考仕様
※今後変更となる可能性があります。
| サイズ*(下向き時) | W73mm × H112mm × D54mm |
|---|---|
| 重量* | 0.35kg |
| 発生トルク(0.4MPa、空気) | 0.6Nm |
| 最大可搬重量(0.4MPa、空気) | 0.1kg |
| 動作回転速度(0.4MPa、空気、無負荷時) | 50min-1 (0.3s/90°) |
| 動作可能範囲 | 0°~100° |
* 取付部材、平行チャック、ツメ含む
姿勢変更イメージ
ピッキングロボット用フィーダ「TRINITTE(トリニッテ)*1」との連携
NTNが開発したピッキングロボット用フィーダ「TRINITTE(トリニッテ)」は、従来のパーツフィーダに、回転円盤とエンコーダを組み合わせたピッキングロボット用部品供給機で、カメラによる画像処理信号をピッキングロボットに取り込み、円弧コンベアトラッキング技術*2を活用して安定した部品の連続ピッキングを実現しています。
このたび開発した「ロータリアクチュエータ式ハンド」は、「TRINITTE」と組み合わせることで、ワークの取り逃がしを防止し、「TRINITTE」の幅広いワーク形状に対応した連続ピッキングや、段取替え時間やワーク詰まりの削減などの特長と合わせて高い生産性を発揮します。
-
2021年9月29日プレスリリース:
ピッキングロボット用フィーダ「TRINITTE(トリニッテ)」を開発
https://www.ntn.co.jp/japan/news/new_products/news202100063.html - 円弧コンベアトラッキング技術:円弧軌道上のワークに追従して移動中のワークを掴む技術
ご参考
<アプリケーション例1> ランダム姿勢のワークのピッキング(「TRINITTE」と連携)
- TRINITTEの回転円盤上にT字状ワークがランダムな姿勢で流れてくる。
- ピッキングロボットが、カメラ画像と回転円盤の速度からピッキング位置を演算し、ワークをトラッキング(追尾)。
-
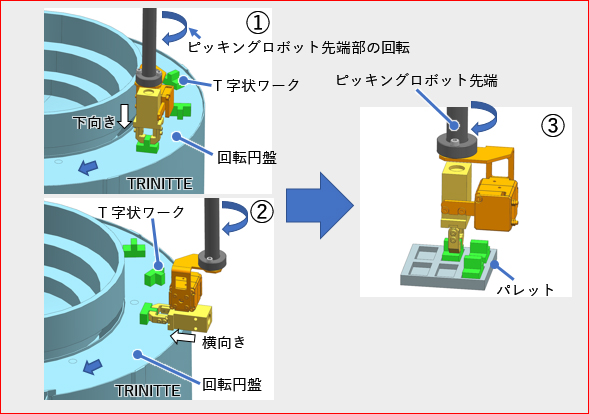
T字状ワークの凸部が上向きに流れてきた場合
ロータリアクチュエータ式ハンドが下向きに姿勢変更し、同時にピッキングロボット先端部が回転し、ワークの真上からピッキングを行う。 -
T字状ワークの凸部が横向きに流れてきた場合
ロータリアクチュエータ式ハンドがロータリアクチュエータの回転軸で回転し、横向きに姿勢変更。同時にピッキングロボット先端部が回転して、ワークの真横からピッキングを行う。 -
パレットに配置する場合
ロータリアクチュエータ式ハンドが①の姿勢の時は、そのままの姿勢で、ピッキングロボット先端部が回転し、ワークをパレットの向きに合わせて配置する。
ロータリアクチュエータ式ハンドが②の姿勢の時は、ロータリアクチュエータの回転軸が回転してチャック部が下向きに姿勢変更。ピッキングロボット先端部が回転してワークをパレットに配置する。
<アプリケーション例2> 搬送時のワーク姿勢変更(「TRINITTE」と連携)
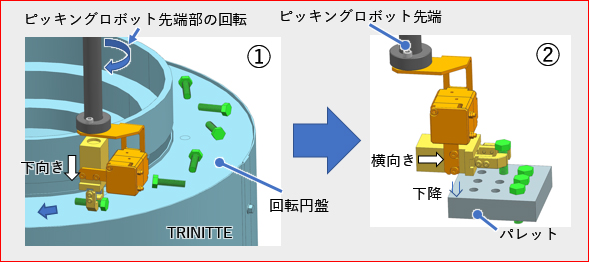
- TRINITTEの回転円盤にランダムな姿勢でワークが流れてくる。
- ピッキングロボットが、カメラ画像と回転円盤の速度からピッキング位置を演算してワークをトラッキング(追尾)。
- ロータリアクチュエータ式ハンドは下向きに姿勢変更し、同時にピッキングロボット先端部が回転して真上からピッキングを行う。
- ワークを把持した後、ロータリアクチュエータ式ハンドは搬送中に横向きに姿勢変更し、配置位置に移動後、ロボットが下降し、ワークを立ててパレットに配置する。
お問い合わせ先
新商品戦略本部 新事業探索開発部 TEL:0538-21-1165
![]()